

ティアフォーと松尾研究所、自動運転2.0に向けた生成AI開発プロジェクトを開始 大規模世界モデルをオープンソース化へ
- 編集部
- 2024年10月17日
AIニュースの要約
- 株式会社ティアフォーと松尾研究所が自動運転の新しいアプローチ「自動運転2.0」を推進する生成AI開発プロジェクトを開始。
- 目的は、従来のロボット工学に依存しないAdaptiveな運転行動を実現するためのEnd-to-End AIを構築すること。
- 大規模な走行データを基にした世界モデルを利用し、リアルタイムでの運転判断が可能な技術を開発。
- プロジェクトの成果はオープンソースとして公開し、いろいろな車種や環境に対応した自動運転ソフトウェアを提供予定。
- 生成AIの進化を活用することで、自動運転技術の社会実装を加速する狙い。
AIニュースの背景(推測)
自動運転技術は近年急速に進化しており、技術の進歩に伴い、自動運転関連企業は効率的で安全な運転を実現するための新しいアプローチを模索しています。従来の自動運転システムは、精密な地図や詳細なルールに依存していたため、その開発や運用には高いコストと時間がかかるという課題がありました。これに対処するために、ティアフォーと松尾研究所は生成AIを使った新たな手法を導入し、自動運転レベル4の運行設計領域を拡大することを目指しています。また、オープンソース方式での提供が決定している点から、エコシステム全体の発展や技術交換を促進する意図もあると考えられます。
AIニュースの内容(詳細)
ティアフォーと松尾研究所は、AI技術と自動運転における最新の研究成果を結びつけ、生成AIによる新たな自動運転システムの開発プロジェクトをスタートさせました。このプロジェクトの核となるのは、自動運転レベル4のOperational Design Domain(ODD)の拡大です。具体的には、実世界の走行データを学習し、運転行動を模倣する大規模世界モデルを構築することで、従来のルールに則らない状況でも適切な運転行動を生成できるEnd-to-End AIを実現することを目指しています。
自動運転2.0アーキテクチャは、従来のモジュラー方式に代わって、生成AIとロボット工学を組み合わせたハイブリッドなフレームワークを設計しています。これにより、商用車や自家用車、さらには高速道路や市街地といった多様な環境での運転をサポートするソフトウェアの開発を目指します。ティアフォーは、「Autoware」と呼ばれる自動運転のためのオープンソースソフトウェアを開発し、このプロジェクトの成果を2025年までに公開することを予定しています。
加藤真平氏(ティアフォー代表取締役社長CEO)は、生成AIの進化が自動運転2.0の実現にとっての重要な要素であると述べています。松尾豊氏(松尾研究所技術顧問)も、世界モデルの重要性を強調し、安全で快適なモビリティを実現することへの期待を寄せています。
ビジネスで活用する方法・可能性
この自動運転2.0プロジェクトは、様々な業種に多くのビジネスチャンスを提供します。以下に、具体的な活用方法やビジネスの可能性について考察します。
-
自動運転プラットフォームの構築: ティアフォーが提供するオープンソースの技術を基に、自社の自動運転システムを開発したい企業は、これを利用することで開発コストを抑えられます。
-
データ提供と評価サービス: 走行データを収集・提供する企業は、生成AIの学習に必要なデータを供給することで、さらなる収益化が期待できます。特に、多種多様な走行条件下でのデータを持つ企業は、その価値を提供しやすいです。
-
コンサルティングや技術サポート: 自動運転技術に不安を抱える企業に対して、技術的なアドバイスや導入支援を行うコンサルタント会社が増える可能性があります。
-
車両開発と製造: 自動運転向けの技術が進化する中で、新たなセンサーやハードウェアの需要が高まります。このことは、車両メーカーや部品メーカーに新たな収益源を提供します。
-
新たなサービスモデルの創出: 自動運転技術を活用した新しいアルゴリズムに基づいたロボットタクシーや配車サービスの展開が可能になります。これにより、既存の交通システムや新たな移動手段が生まれるでしょう。
これらの要素を考えると、ティアフォーと松尾研究所の生成AI開発プロジェクトは、自動運転の未来を制御する重要な役割を果たし、新しいビジネスモデルやサービスを生み出すきっかけになると期待されます。自動運転市場は今後数年間でさらに拡大し、関連ビジネスにおいても多くの可能性が開かれるでしょう。
ティアフォーと松尾研究所、自動運転2.0に向けた生成AI開発プロジェクトを開始 大規模世界モデルをオープンソース化へ株式会社ティアフォー2024年10月17日 10時00分0自動運転の民主化をビジョンに掲げるティアフォーと東京大学大学院工学系研究科松尾・岩澤研究室における研究成果の開発・実装を担う松尾研究所は、自動運転レベル4の運行設計領域(Operational Design Domain:ODD)を飛躍的に拡大させるための生成AI開発を開始しました。本プロジェクトでは、大量の走行データを学習して実世界の運転行動の常識を模倣できる大規模世界モデルを構築することで、事前に定義したルールが適用できない状況においても、周囲の環境情報から適切な運転行動を生成可能なEnd-to-End AIを実現します。また、最新の生成AIと従来のロボット工学を組み合わせたハイブリッドなフレームワークを設計することで、商用車から自家用車まで様々な車種に対応でき、かつ高速道路から市街地まで様々な環境に対応できる自動運転ソフトウェアを実現します。これらの成果はすべてオープンソースとして公開する予定です。
自動運転レベル4に対する従来のロボット工学的なアプローチでは、認知・判断・操作に係る様々な機能モジュールを組み合わせるために、事前定義された高精度地図や詳細なルールの記述が必要でした。このようなアーキテクチャは自動運転1.0と呼ばれ、ティアフォーが開発を主導する自動運転用オープンソースソフトウェア「Autoware*1」にも採用され、国内外の様々な自動運転レベル4の製品サービス開発で実績を重ねてきました。一方、近年では、認知・判断・操作に係る様々な機能モジュールと同じ効果を1つのEnd-to-End AIモデルで実現できるようになり、そこに従来のロボット工学的なアプローチも織り交ぜた自動運転2.
出典 PR TIMES
関連記事
 ティアフォーと松尾研究所、自動運転2.0に向けた生成AI開発プロジェクトを開始 大規模世界モデルをオープンソース化へ
ティアフォーと松尾研究所、自動運転2.0に向けた生成AI開発プロジェクトを開始 大規模世界モデルをオープンソース化へ
 Easy technology、督促コールセンター向け生成AIソリューション活用サービスの提供を開始
Easy technology、督促コールセンター向け生成AIソリューション活用サービスの提供を開始
 ヘルム・エーアイ、VidGen-2を発表:自動運転のための高解像度とリアルさを強化したマルチカメラ対応の生成AI
ヘルム・エーアイ、VidGen-2を発表:自動運転のための高解像度とリアルさを強化したマルチカメラ対応の生成AI
 プロ講師 × テクノロジーの可能性を追求するスタディカルテが、生成AIを活用したキービジュアルを公開。受験生の志望校・志望学部に特化する形でサービス展開をスタート
プロ講師 × テクノロジーの可能性を追求するスタディカルテが、生成AIを活用したキービジュアルを公開。受験生の志望校・志望学部に特化する形でサービス展開をスタート
 「バクヤスAI 記事代行」サービスロゴ刷新のお知らせ
「バクヤスAI 記事代行」サービスロゴ刷新のお知らせ
 UGC獲得のカギは生成AIにあった!?プロモーション施策における生成AI活用のポイント大公開【10/23(水) 16:00〜ウェビナー開催】
UGC獲得のカギは生成AIにあった!?プロモーション施策における生成AI活用のポイント大公開【10/23(水) 16:00〜ウェビナー開催】
 INTLOOP、デジタルクローン活用 HR/コンサルティング事業創出でオルツと戦略的協業検討開始
INTLOOP、デジタルクローン活用 HR/コンサルティング事業創出でオルツと戦略的協業検討開始
 オルツ、INTLOOPとデジタルクローン活用 HR/コンサルティング事業創出で戦略的協業検討開始
オルツ、INTLOOPとデジタルクローン活用 HR/コンサルティング事業創出で戦略的協業検討開始
 【開催報告】参加者満足度90%!企業の法務責任者を対象とした完全招待制イベント「LegalOn Summit 」第二弾を9月19日(木)に開催しました。
【開催報告】参加者満足度90%!企業の法務責任者を対象とした完全招待制イベント「LegalOn Summit 」第二弾を9月19日(木)に開催しました。
 Tech0、UXを重視したエンタープライズ版ChatGPT『AI ナレッジポータル』の提供開始!ユーザーの社内情報検索や経営層の生成AIに関する意思決定をサポート!
Tech0、UXを重視したエンタープライズ版ChatGPT『AI ナレッジポータル』の提供開始!ユーザーの社内情報検索や経営層の生成AIに関する意思決定をサポート!
 生成AI業界初!テキスト生成、RAG機能、画像生成に加え、「書類の誤字脱字をチェックする機能」も利用可能に!社内資料参照の法人向け生成AI「Crew」
生成AI業界初!テキスト生成、RAG機能、画像生成に加え、「書類の誤字脱字をチェックする機能」も利用可能に!社内資料参照の法人向け生成AI「Crew」
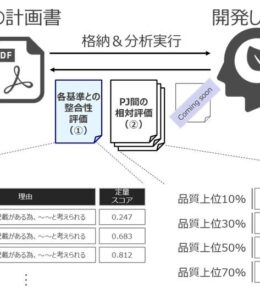 生成AIを活用してカーボンクレジットの品質を評価するシステムの構築について
生成AIを活用してカーボンクレジットの品質を評価するシステムの構築について