
東京ロボティクス、Isaac SimとMuJoCoで利用可能な形式で新型Toroboのモデルを公開
- 編集部
- 2024年10月26日
AIニュースの要約
- 東京ロボティクス株式会社は、新型ToroboのモデルデータをNVIDIAのIsaac SimおよびGoogle DeepMindのMuJoCoで利用可能な形式で公開しました。
- 新型Toroboのモデルは、代表的なハンド付き全身、ハンドなし全身、ハンド単体の3種類があります。
- これにより、ロボットの動作生成と人型ロボットの研究開発の加速を図ります。
- Isaac SimとMuJoCoは、高精度の物理シミュレーションが可能で、実世界への応用を意識したモデル設計が行われています。
- 東京ロボティクスは、オープンな技術共有を通じて日本のロボット産業のイノベーションを加速させることを目指しています。
AIニュースの背景(推測)
東京ロボティクスが新型Toroboのモデルを公開する背景には、急速に成長するロボット市場のニーズがあると考えられます。特に、人型ロボットの利用が多様化する中で、研究開発の加速が求められています。これは、労働力不足や生産性向上の観点からもロボット技術の導入が進む中、企業や研究機関がロボット技術を容易に試すための環境が整備されていることを示しています。また、オープンな技術共有が促進されることで、多くの研究者や開発者が新しい技術にアクセスでき、共創が生まれることが期待されています。これにより、日本国内だけではなく、国際的な競争力を強化する意図もあると推測されます。
AIニュースの内容(詳細)
東京ロボティクスが発表した新型Toroboのモデルデータの公開は、特にロボット産業において重要なステップです。新型Toroboは、2025年3月に発売予定であり、そのシミュレーションモデルは無償で提供されます。モデルデータは、物理シミュレーションを得意とするNVIDIAのIsaac SimおよびGoogle DeepMindのMuJoCoが採用されており、リアルなロボットの動作を忠実に再現することが可能です。
公開されるモデルは、ハンド付き全身、ハンドなし全身、ハンド単体の3種類から構成されています。これにより、さまざまなシミュレーションを通じてロボットの動作を試すことができます。さらに、Isaac SimとMuJoCoは豊富なアセットを持ち、効率的に作業空間を再現できる利点があります。ユーザーは、これらのモデルを使用して現実に近い環境での評価を行うことができ、実機を導入する前にその性能を確認することができます。
東京ロボティクスのCEOである坂本義弘氏は、今後も技術のオープンな共有を通じて、さらなるイノベーションを促進していく意向を示しています。これは、ロボット技術がより多くの人々によって利用され、発展していくための重要な要素といえるでしょう。
ビジネスで活用する方法・可能性
新型Toroboのモデルデータの公開は、さまざまな業界におけるロボット技術の導入において、多くのビジネスチャンスを生む可能性があります。以下に、その具体的な活用方法をいくつか挙げます。
-
研究開発の加速:企業や研究機関は、提供されたモデルデータを用いて自社のロボット開発の迅速化を図ることができます。特に、試作やプロトタイプの開発において、リアルなシミュレーションを通じてフィードバックを得ることができるため、開発の効率が向上します。
-
トレーニングと教育:高等教育機関や企業の研修プログラムにおいて、これらのシミュレーションモデルを使用してロボット技術についての理解を深めることができます。具体的なモデルを使用することで、学生や従業員が実践的なスキルを身につけることが可能です。
-
デジタルツインの活用:シミュレーション空間を利用して、企業は自社の業務プロセスを模擬し、デジタルツインを作成することができます。これにより、効率化や最適化を図るためのデータ分析が行え、経営戦略に反映させることが可能です。
-
顧客へのデモンストレーション:企業は、自社製品を新型Toroboを用いてシミュレーションしたデモンストレーションを行うことで、顧客への説得力のあるプレゼンテーションを実施できます。これにより、製品への信頼性を高め、販売促進につなげることができるでしょう。
-
国際競争力の強化:東京ロボティクスの技術が他国に共有されることで、国内の企業は国際的なパートナーシップや共同研究の機会を探ることができます。これには、新たな市場への進出や技術提携の可能性が含まれ、ビジネスの拡大に寄与します。
新型Toroboのモデルデータの公開は、単なる技術の提供にとどまらず、ビジネスエコシステム全体を活性化させる効果が期待されています。企業や研究者がこの機会をうまく活用することで、日本のロボット産業の発展に寄与することができるでしょう。
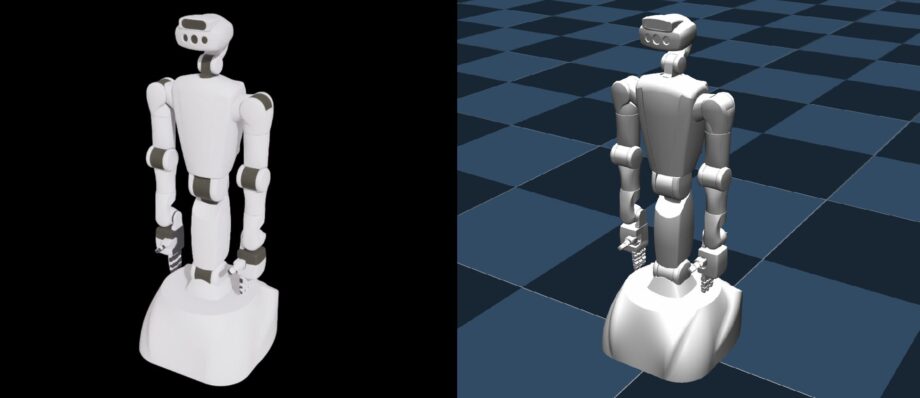
東京ロボティクス、Isaac SimとMuJoCoで利用可能な形式で新型Toroboのモデルを公開AIと連携したロボットの動作生成の研究や、人型ロボットの産業応用の研究を加速東京ロボティクス株式会社2024年10月25日 12時00分10最先端ロボット技術を追求する東京ロボティクス株式会社(東京都文京区、代表取締役:坂本義弘)は、日本のロボット研究を加速させるために2025年3月に発売予定の新型ToroboのモデルデータをNVIDIA社のIsaac SimおよびGoogle DeepMind社のMuJoCoで利用可能な形式で公開します。
Isaac Sim上で立ち上げられた新型Torobo(左)とMuJoCoで立ち上げられた新型Torobo(右)
生成AIによるロボットの動作生成などのAIの技術の発展によって、人型ロボットの研究開発が飛躍的に進歩しています。東京ロボティクスではこれまで人型ロボットToroboの開発を進めてきましたが、新型Toroboのシミュレーションモデルおよび使用方法を公開することとしました。新型Toroboのモデルデータをより多くの方々に使用していただくことで、ロボット技術のさらなる発展を図ります。モデルデータ
・Isaac Sim: https://github.com/TokyoRobotics/torobo_usd_models
・MuJoCo: https://github.com/TokyoRobotics/torobo_mujocoIsaac Sim上で立ち上げられた新型ToroboMuJoCo上で立ち上げられた新型Torobo
モデルの使用方法
・Isaac Sim: Isaac Simを用いたToroboの動作方法 – Qiita
・MuJoCo: MuJoCoを用いたToroboの動作方法 – Qiita※ モデルは、ハ
出典 PR TIMES
関連記事
 11月開催!CODE BLUE 2024 に CyCraft が登壇、最新ソリューションを発表
11月開催!CODE BLUE 2024 に CyCraft が登壇、最新ソリューションを発表
 多言語音声データを用いた日本語音声合成モデルを開発
多言語音声データを用いた日本語音声合成モデルを開発
 ネットスマイル、書類画像処理に関する特許を取得
ネットスマイル、書類画像処理に関する特許を取得
 GDXが米・シリコンバレーで生成AIのハッカソンを開催
GDXが米・シリコンバレーで生成AIのハッカソンを開催
 『大規模言語モデル(LLM)白書2024年版 ー モデルの拡張・応用・特化型・プラットフォーム動向篇』 発刊のお知らせ
『大規模言語モデル(LLM)白書2024年版 ー モデルの拡張・応用・特化型・プラットフォーム動向篇』 発刊のお知らせ
 IBMとNASA、気象・気候への応用に適したオープンソースのAIモデルをHugging Faceで公開
IBMとNASA、気象・気候への応用に適したオープンソースのAIモデルをHugging Faceで公開
 TDSE、生成AIアプリ開発ツール『Dify』サービスサイトを公開
TDSE、生成AIアプリ開発ツール『Dify』サービスサイトを公開
 Discord、デベロッパーエコシステムの次なるステップとして、全デベロッパーにアクティビティの開放を発表
Discord、デベロッパーエコシステムの次なるステップとして、全デベロッパーにアクティビティの開放を発表
 カグオク株式会社 本社オフィス移転のお知らせ
カグオク株式会社 本社オフィス移転のお知らせ
 「SKS JAPAN 2024 -Global Foodtech Summit-」日本が進むべき食の未来・食の新産業のあり方を問う3日間
「SKS JAPAN 2024 -Global Foodtech Summit-」日本が進むべき食の未来・食の新産業のあり方を問う3日間
 ティアフォーと松尾研究所、自動運転2.0に向けた生成AI開発プロジェクトを開始 大規模世界モデルをオープンソース化へ
ティアフォーと松尾研究所、自動運転2.0に向けた生成AI開発プロジェクトを開始 大規模世界モデルをオープンソース化へ
 東京大学発スタートアップ (株)WOGO / AIとアルゴリズムを活用した製造・建築業界向けの2D・3D設計見積自動化サービスをリリース
東京大学発スタートアップ (株)WOGO / AIとアルゴリズムを活用した製造・建築業界向けの2D・3D設計見積自動化サービスをリリース